
该团队开发了一种软传感器系统,该系统覆盖了机器人的身体,可提供“本体感觉”,即感知其身体的运动和位置。传感器收集的数据通过一个深度学习模型运行,该模型可以筛选出噪音并捕获清晰的信号,以估算机器人的3D状态。研究人员在看起来像大象躯干的机械臂上进行了验证测试,该机械臂可以预测其自身的位置并自动摆动和伸展。
团队使用的传感器是使用现成的材料制成的。研究人员未来的目标之一是制造出可以更加灵巧地操纵环境物体的人造肢体。软机器人的长期目标是将身体传感器完全集成到机器人中。一位研究人员发现了用于屏蔽电磁干扰的导电材料,这种材料可以在任何地方以成卷的形式购买,这给研究小组带来了一个突破。
这种材料具有压阻特性,科学家们意识到他们可以用这种材料制作有效的软传感器。当传感器变形时,其电阻转换为特定的输出,而电压用作与运动相关的信号。最终,该团队转向了一种称为kirigami的折纸,将导电硅胶片的矩形条激光切割成各种图案,以使其更具柔性。然后将它们添加到先前设计的软机器人主体中。
2017年美国科学家已经研制一款柔软机械手臂,装配光学传感器可使机械手臂能够探测到物体微妙的外形和纹理结构。

数十年以来,机械手臂已在生产线上使用,能够自动化加工和快速装配许多商品,例如:计算机配件和汽车零件等。尽管机械手臂非常实用,但是它们仍缺乏人类手臂般的触觉,目前,科学家设计一款柔软机械手臂,通过触摸能够探测到物体的纹理和外形。
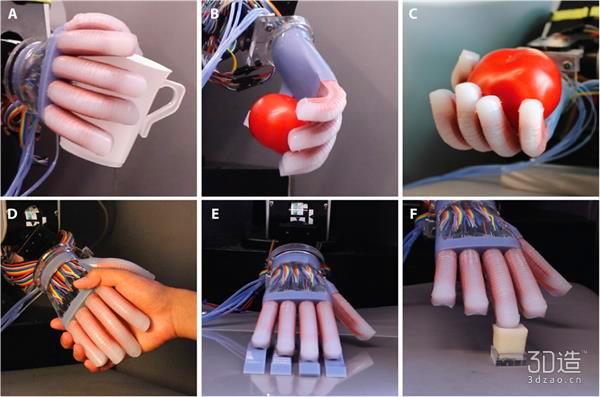
美国康奈尔大学工程师采用了一种不同的方法,使用光线携带信号结合可伸展的传感器,通过改变所携带的光线信号,它们的光波导可以探测到外部环境,光线将被扭曲或者弯曲。
在传感器的测试过程中,康奈尔大学研究小组将这些传感器与柔软机械手臂结合在一起,机械手臂能够用手指抓起3个番茄,基于光线信号扭曲度,对番茄施压计算它们的硬度如何,同时发现番茄的成熟情况。
麻省理工学院(Massachusetts Institute of Technology),简称麻省理工(MIT),位于美国马萨诸塞州波士顿都市区剑桥市,是世界著名私立研究型大学。 麻省理工学院素以顶尖的工程学和计算机科学而著名,拥有麻省理工人工智能实验室(MIT CSAIL)、林肯实验室(MIT Lincoln Lab)和麻省理工学院媒体实验室(MIT Media Lab),其研究人员发明了万维网、GNU系统、Emacs编辑器、RSA算法等等。
2019-2020年度,麻省理工学院位列QS世界大学排名第一 、USNews世界大学排名第二 、软科世界大学学术排名(ARWU)第四 、泰晤士高等教育世界大学排名第五 ;泰晤士高等教育世界大学声誉排名第二。2019福布斯美国大学排行榜排名第4名 。